Situatie
| ArduCopter
Arducopter face parte din proiectul ArduPilot care a fost inceput in anul 2013 .
|
 |
Solutie
Module hardware
Hardware-ul pentru multicopter cuprinde mai multe module:
- modulul de receptie
- autopilotul
- modul FPV
- modul telemetrie
- modul comanda motoare
In acest articol vom detalia modulul autopilot. In speta acest modul se ocupa de asigurarea stabilitatii multicopterului si pastrarea zborului in parametri stabiliti. In acelasi timp modulul preia comenzile da la receptorul telecomezii si comanda controlerele motoarelor.
Unul dintre cele mai folosite tipuri de autopilot este modelul Pixhawk.
![]()
Acest model a fost dezvoltat de o echipa independeta care a colaborat cu cei de la 3D Robotics si ArduPilot Group.
Caracteristici de baza:
168 MHz Cortex M4F CPU (256 KB RAM, 2 MB Flash)
Sensori: 3D ACC / Gyro / MAG / Baro
Porturi: microSD slot, 5 UARTs, CAN, I2C, SPI, ADC, etc.
Prezetarea oficiala a functionalitatilor este facuta in urmatoarea fotografie:
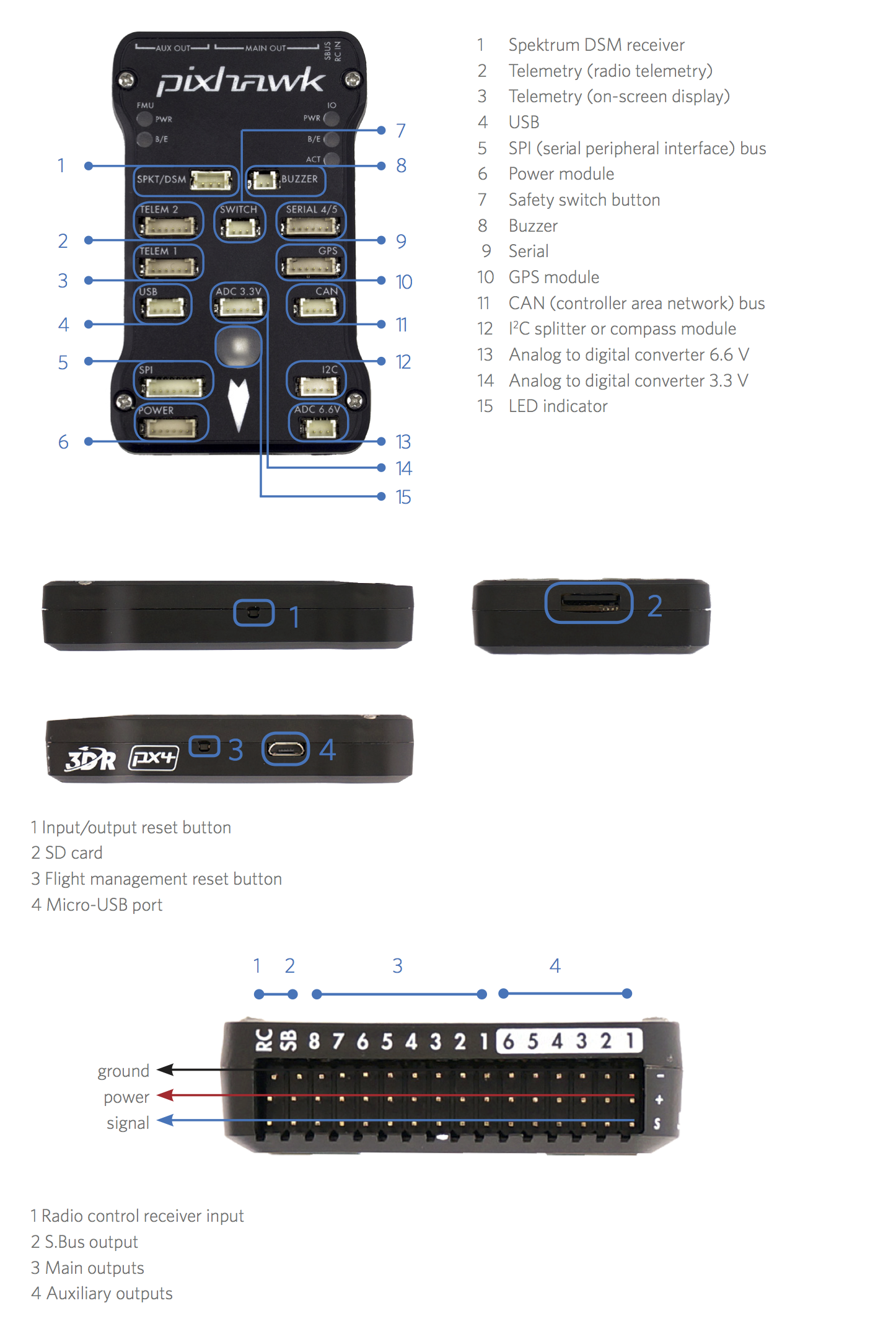
Alimentarea modulului.
Alimentarea modulului se face prin conectorul din dreapta jos (cel marcat in poza)
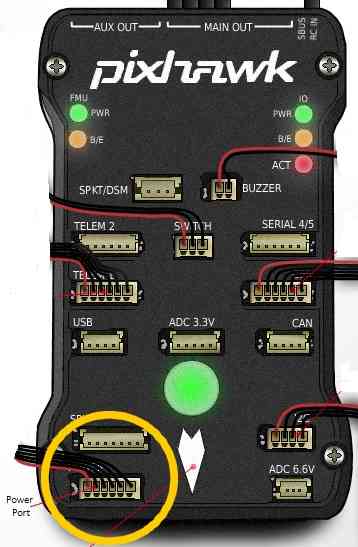
Regulatorul de tensiune cu care se face alimentarea este de tipul 3DR power module .
Folosirea acestui tip de regulator va reduce foarte mult riscul de supraincarcare al modulului.
Atentionare!!!!!!
Nu se va limenta niciodata modulul autopilot direct de la acumultator, se va folosi intodeauna un regulator de tip ESC sau BEC.
Alimentare de Backup
Pentru marirea sigurantei se recomanda alimentarea cu un stabilizator de tip BEC pe portul de servo.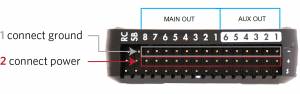
Acest tip de conectare va resui sa tina alimentat autopilotul daca prima sursa de alimentare se defecteaza.
Leave A Comment?